Forward mode automatic differentiation
Oisín Fitzgerald, April 2021
A look at the first half (up to section 3.1) of:
Baydin, A. G., Pearlmutter, B. A., Radul, A. A., & Siskind, J. M. (2018). Automatic differentiation in machine learning: a survey. Journal of machine learning research, 18.
Introduction
Automatic differentiation (autodiff) reminds me of Arthur C. Clarke's quote "any sufficiently advanced technology is indistinguishable from magic". Whereas computer based symbolic and numerical differentiation seem like natural descendants from blackboard based calculus, the first time I learnt about autodiff (through Pytorch) I was amazed. It is not that the ideas underlying autodiff themselves are particularly complex, indeed Bayin et al's look at the history of autodiff puts Wengert's 1964 paper entitled "A simple automatic derivative evaluation program" as a key moment in forward mode autodiff history. (BTW the paper is only 2 pages long - well worth taking a look). For me the magic comes from autodiff being this digitally inspired look at something as "ordinary" but so important to scientific computing and AI as differentiation.
Differentiation
If you are unsure of what the terms symbolic or numerical differentiation mean, I'll give a a quick overview below but would encourage you to read the paper and it's references for a more detailed exposition of their various strengths and weaknesses.
Numeric differentiation - wiggle the input
For a function \(f\) with a 1D input and output describing numeric differentiation (also known as the finite difference method) comes quite naturally from the definition of the derivative. The derivative is
\[\frac{df}{dx} = \text{lim}_{h \rightarrow 0}\frac{f(x+h)-f(x)}{h}\]so we approximate this expression by picking a small enough \(h\) (there are more complex schemes). There are two sources of error here, the first is from approximating the infinitesimally small \(h\) with a plain finitely small \(h\) (truncation error) and the second is from round-off error. Round-off error occurs because not every number is represented in the set of floating point numbers so for a small \(h\) the difference \(f(x+h)-f(x)\) can be quite unstable. Unfortunately these two source of error play against each other (see graph - on the left hand size round-off error dominates whereas on the right hand side truncation error dominates).
using Plots
plotlyjs()
h = 10 .^ range(-15, -3, length=1000)
x0 = 0.2
f(x) = (64*x*(1-x)*(1-2*x)^2)*(1-8*x+8*x^2)^2
df = (f.(x0 .+ h) .- f(x0)) ./ h
plot(log10.(h),log10.(abs.((df .- 9.0660864))),
xlabel="log10(h)",ylabel="log10(|Error|)",legend=false)
However, such small errors are actually not all that important in machine learning! The main issue with numeric differentiation for machine learning is that the number of required evaluations of our function \(f\) scales linearly with the number of dimension of the gradient. In contrast backpropagation (an autodiff method) can calculate the derivatives in "two" evaluations of our function (one forward, one back).
Symbolic - fancy lookup tables
Symbolic differentiation is differentiation as you learnt it in school programmed into software, all the rules \(\frac{d}{dx}\text{cos}(x) = -\text{sin}(x), \frac{d}{dx} x^p = px^{(p-1)}, \frac{d}{dx}f(g(x)) = f'(g(x))g'(x)\) etc... are known and utilised by the software. If you evaluate the derivative of a function f using a symbolic programming language dfdx = derivative(f,x) the object returned dfdx is just whatever function the symbolic program matches as the derivative of f using it's internal derivative lookup and application of the rules of differentiation (chain rule etc). It is manipulation of expressions. The main issue with symbolic differentiation for ML (which anyone who has used Mathematica for a help with a difficult problem can attest to) is expression swell, where the derivative expression is exponentially longer than the original expression and involves repeated calculations.
Automatic differentiation - alter the program
Autodiff is the augmentation of a computer program to perform standard computations along with calculation of derivatives, there is no manipulation of expressions. It takes advantage of the fact that derivative expressions can be broken down into elementary operations that can be combined to give the derivative of the overall expression. I'll be more clear about elementary operations soon but you can think of an elementary operations as being any operation you could give to a node on a computational graph of your program.
Forward mode
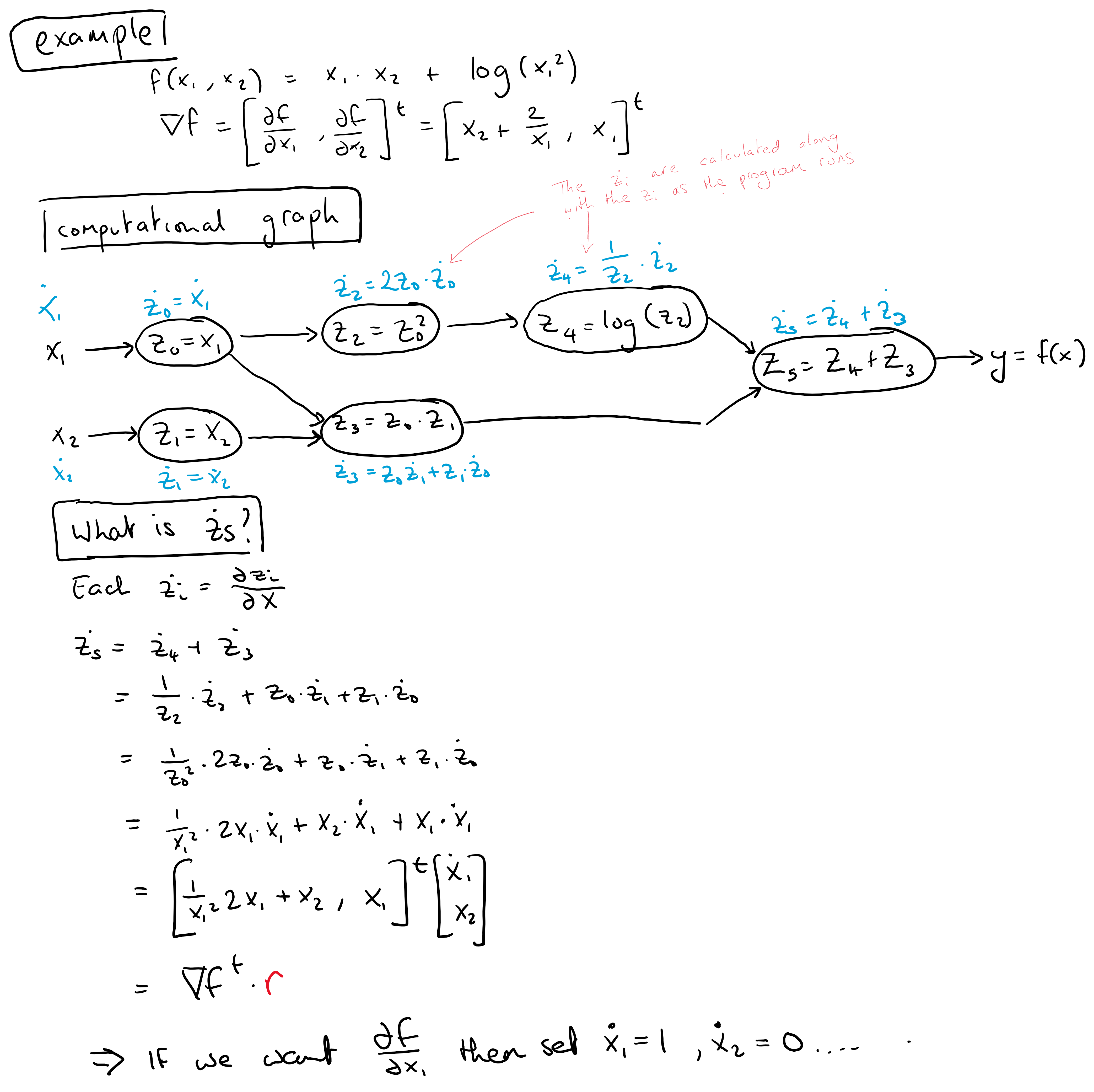
To be more concrete about autodiff, let's look at forward mode. Consider evaluating \(f(x_1,x_2) = x_1 x_2 + \text{log}(x_1 ^2)\). We break this into the computational graph below and associate with each elementary operation the intermediate variable \(\dot{v}_i = \frac{\partial v_i}{\partial x}\), called the "tangent". The final "tangent" value \(\dot{v}_5\), which has been calculated as the function evaluates at the input (3,5) is a derivative at the point (3,5). What derivative exactly depends on the initial values of \(\dot{x_1}\) and \(\dot{x_2}\).
Sketching a forward mode autodiff library
It's surprisingly easy to implement forward mode autodiff in Julia (at least a naive form). Below I create a forward model module that creates a new object Dual that is a type of Number, and then proceed to overload common mathematical functions (e.g. sin and *) to account for this new number type. Each instance of Dual with have a prime and tangent slot. If we want the derivative with respect to argument x₁ of the function y = f(x₁,x₂) we simply set x₁.t = 1.0 (leaving x₂.t = 0.0) and check the value of y.t. For more see this video from MIT's Alan Edelman
import Base: +,-,/,*,^,sin,cos,exp,log,convert,promote_rule,println
struct Dual <: Number
p::Number # prime
t::Number # tangent
end
+(x::Dual,y::Dual) = Dual(x.p + y.p, x.t + y.t)
-(x::Dual,y::Dual) = Dual(x.p - y.p, x.t - y.t)
/(x::Dual,y::Dual) = Dual(x.p/y.p, (x.t*y.p - x.p*y.t)/x.p^2)
*(x::Dual,y::Dual) = Dual(x.p*y.p, x.t*y.p + x.p*y.t)
sin(x::Dual) = Dual(sin(x.p), cos(x.p) * x.t)
cos(x::Dual) = Dual(cos(x.p), -sin(x.p) * x.t)
exp(x::Dual) = Dual(exp(x.p), exp(x.p) * x.t)
log(x::Dual) = Dual(log(x.p), (1/x.p) * x.t)
^(x::Dual,p::Int) = Dual(x.p^p,p*x.p^(p-1)* x.t)
# We can think of dual numbers analogously to complex numbers
# The epsilon term will be the derivative
println(x::Dual) = println(x.p," + ",x.t,"ϵ")
# deal with conversion, and Dual with non-Dual math
convert(::Type{Dual}, x::Number) = Dual((x,zero(x)))
promote_rule(::Type{Dual},::Type{<:Number}) = Dual;Lets test on our example \(f(x_1,x_2) = x_1 x_2 + \text{log}(x_1 ^2)\), the derivative at (3,5) should be \(5 \frac{2}{3}\).
x1 = Dual(3.0,1.0)
x2 = Dual(5.0,0.0)
f(x1,x2) = x1*x2 + log(x1^2)
y = f(x1,x2)
# df/dx1
println(y.t)
# direct calculation
println(x2.p + 2/x1.p)5.666666666666667
5.666666666666667
Conclusion
Autodiff is important in machine learning and scientific computing and (forward mode) surprisingly easy to implement. I'll look at reverse mode autodiff in another post.
Thanks to Oscar Perez Concha who helped with discussions on the content of this post.